Report: A Transformable Wheel-Leg Hybrid for Adabot
Transformable robots can adapt their bodies to better suit their environments. Adabot is a small-scale autonomous robotic rover intended for search and rescue and exploration [1]. This semester, I worked on a transformable wheel-leg hybrid to enable Adabot to more effectively adapt to its environment and overcome obstacles.
Wheel-leg hybrids are often used in transformable robots. The core idea is to have a wheel that can deploy spoke-like legs that extend radially outward reducing their points of contact with the ground[2]. This grants the robot utilizing the wheel-leg hybrid the best of both worlds: the speed and efficiency of a traditional wheel and the ability to overcome rough terrain using legs. The rational for wheel-leg hybrids is fairly simple. The traditional wheel has been a cornerstone of human vehicles since the beginning of technology for a reason. They are easy to make, provide excellent speed and mobility, and are so energy efficient that their basic design has not had to be updated for centuries. Legged movement apparatuses are more prone to failure and require far more energy per unit of travel than their simpler counterparts, but they do offer one clear advantage in overcoming obstacles. The larger radii and smaller points of contact with the ground that make them easier to break and require more energy do allow them to climb over obstacles that would be impassible for a simple wheel. Robots that are subjected to irregular terrain are prime candidates for transformable wheels. For search and rescue robots like Adabot, the ability to quickly and reliably overcome difficult terrain is a must.
Design Requirements
Adabot’s transformable wheel was designed with two key guiding principles in mind. First, the design had to be simple. Simplicity ensures that the wheel is easy to fabricate and assemble. This saves time for researchers working with Adabot and ensures that replacement parts are always readily available. A simpler design also means that there are fewer points of failure for the mechanism. While far more elegant transformable wheels have been created, every additional step in the transformation process provides an additional point where something could go wrong. In contrast, a simple design means that issues are easily identified and addressed.
The second design principle was also driven by the need to ensure the reliability of the transformation mechanism. The design needed to reduce friction where possible. Previous implementations of a wheel-leg hybrid for Adabot had failed because the friction involved in the transformation process was too much for its parts, causing them to break. Reducing friction also offers the added benefit of making the transformation process more efficient and less taxing on Adabot’s motor.
Design
The resulting transformable wheel design consists of only three primary parts: an outer rim, an inner rim, and the legs. The inner rim is a disk 35 mm in radius and 2 mm thick. In Figure 1 and 2, the outer rim is the larger of the two discs in the picture. It operates as the wheel, when Adabot is in wheel mode. On the outside of the inner rim are four brackets, upon which the legs can be hinged. These brackets extend outward from the rim 5 mm, providing the legs room necessary to carry out their motion for the transformation.
The outer rim is essentially a smaller version of the inner rim. It measures 15 mm across. In Figure 2, the outer rim is illustrated as the smaller disc on the left side of the image. In order to transform into legged mode, the outer rim is retracted in towards the inner rim.
The legs are 30 mm long and 3 mm thick. They have two mounting areas: a 1 mm hole for attaching to the inner rim, and a 1 mm thick slit running up the length of the leg. Figure 1 and 2 illustrate how the legs are affixed to the rims. The hole is attached to the outer rim via a pin, allowing for rotation at that point. The channel is attached via an identical pin to the inner rim, allowing for the leg to both rotate around and slide over the pin. This allows the legs to glide outward or extend into legged mode, or inward, retracting into wheel mode.
Design Images
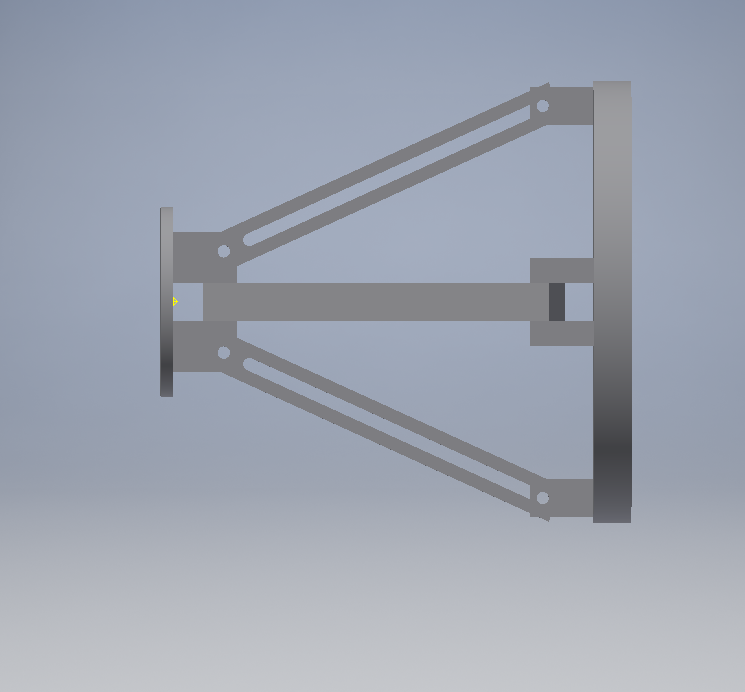
Figure 1: side view of the wheel design
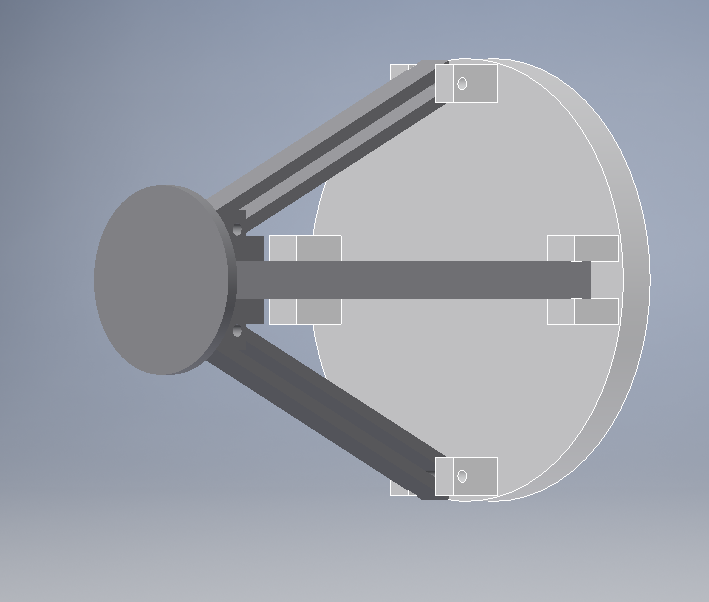
Figure 2: corner view of the wheel design
References
[1] A. J. Clark, “Evolving adabot: A mobile robot with adjustable wheel extensions,” 2017 IEEE Symposium Series on Computational Intelligence (SSCI), Honolulu, HI, 2017, pp. 1-8. doi: 10.1109/SSCI.2017.8280979
[2] A. Conduraru (Slătineanu) et al., “An Overview on the Design of Mobile Robots with Hybrid Locomotion”, Advanced Materials Research, Vol. 837, pp. 555-560, 2014